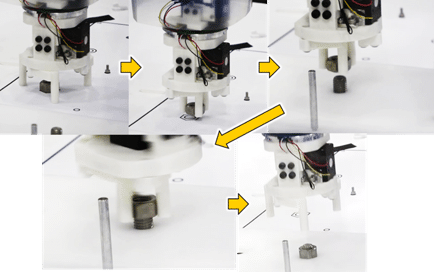
This is a novel gripper that enables high-speed grasping with part-alignment functionality to efficiently perform assembly operations. High-speed operation The size of the gripper is compact at 76 mm wide and 72 mm tall. This compactness facilitates obstacle avoidance when operating a manipulator with the proposed gripper. The weight of the gripper is minimal at 0.2 kg, making it compatible with a manipulator with a small payload. We experimentally verify the effective position alignment range and devise a grasp strategy to extend it. Experimental validation
Masanari Tennomi, Yosuke Suzuki, Tokuo Tsuji, Tetsuyou Watanabe, High-speed gripper with position-alignment functionality based on quick-return mechanism, Advances in Mechanism and Machine Science. IFToMM WC 2019. Mechanisms and Machine Science, pp.2585-2597, 2019. doi:10.1007/978-3-030-20131-9_256