
Research Goals
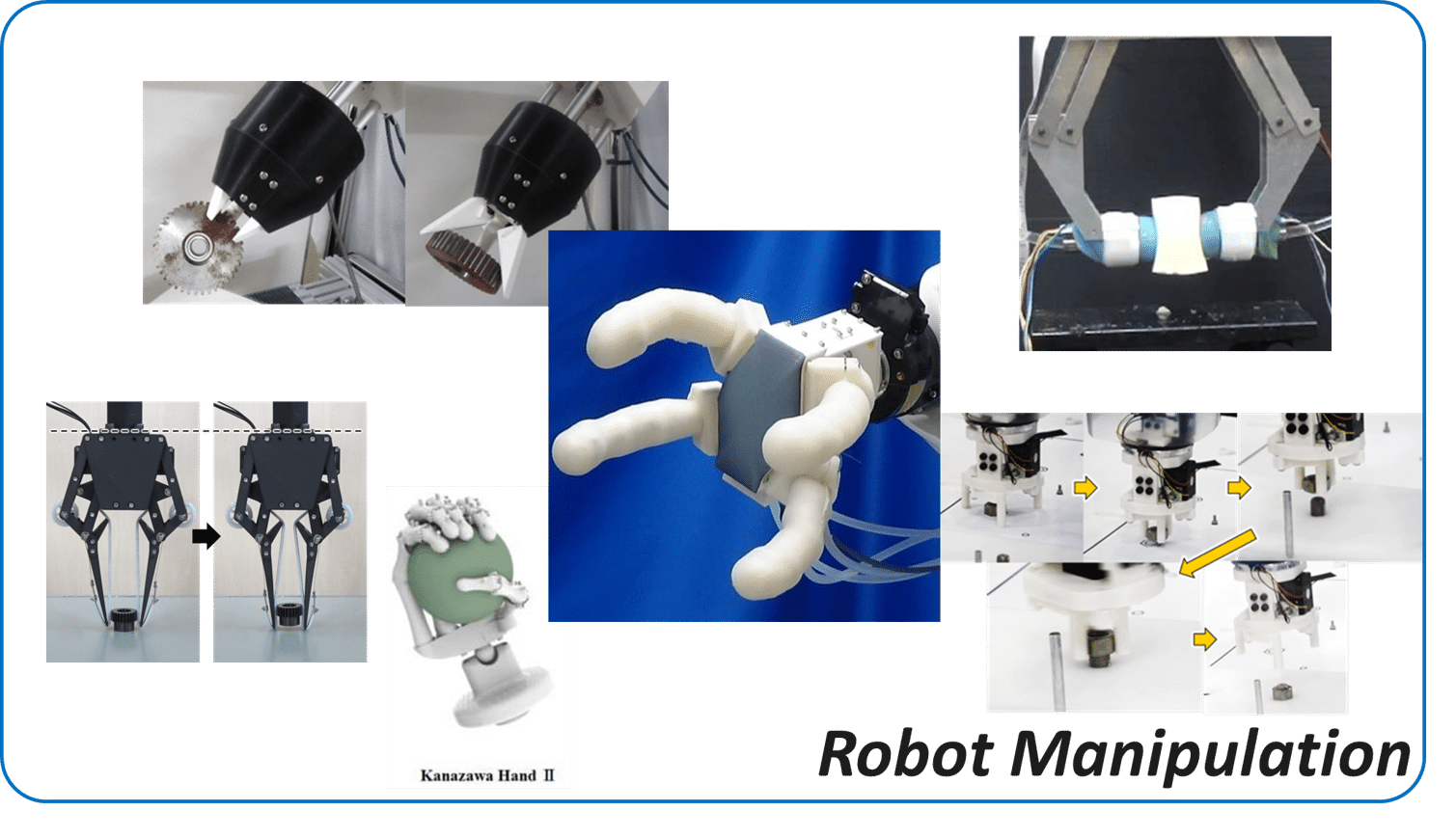
The Human Machine Innovation Laboratory is dedicated to advancing research at the intersection of robotics and human-centered applications, with a particular focus on robot manipulation and innovations in medical and welfare technologies. The lab aims to develop intelligent robotic systems capable of precise and adaptive manipulation tasks, enabling seamless interaction with complex, unstructured environments. In the medical and welfare domains, the research focuses on creating assistive technologies that enhance quality of life, support aging populations, and promote rehabilitation and caregiving efficiency. By integrating cutting-edge mechanism design, soft robotics, and human–robot interaction techniques, the laboratory strives to pioneer solutions that bridge the gap between advanced robotics and real-world human needs.
News
- 2025/08/07 Professor Tetsuyou Watanabe Featured in an article by IFRC (Japanese)
- 2024/09/05 西村斉寛助教,石川素晴君(既卒),渡辺哲陽教授が日本ロボット学会第5回優秀研究・技術賞を受賞しました.また,西村斉寛助教は第39回研究奨励賞,第5回優秀講演賞も受賞し,トリプル受賞になります.
- 2023/03/16 M2無量江翼君,D2野尻晴太君の研究(どちらも共著:西村斉寛助教,渡辺哲陽教授)を第28回ロボティクスシンポジアにて発表しました.無量江君の研究「自動動作切替機能により高可搬と受動なじみ動作を実現する1自由度ロボットハンド」が本学会で最も優れた研究に贈られる「最優秀賞」を受賞しました
- 2023/03/10 西村斉寛助教(共著:M2無量江翼君,渡辺哲陽教授),D2野尻晴太君(共著:西村斉寛助教,渡辺哲陽教授)の論文がそれぞれIEEE Robotics and Automation Lettersに採択されました.
- 2023/02/22 SI2022にて当研究室からの発表4件がSI優秀講演賞を受賞しました.
- 2022/12/20 西村斉寛助教,D2 野尻晴太君,渡辺哲陽教授がSICE SI部門の研究奨励賞を受賞しました.
- 2022/12/20 SI2022 in 幕張にて本研究室から4件の発表を行いました.本研究室は研究成果の周知,学生の発表スキルの向上を目指し,積極的な学会参加を行っています
Access
Human Machine Innovation Laboratory
Natural Science and Technology Hall 3, Kanazawa University,
Kakumamachi, Kanazawa, Ishikawa 920-1164