Object manipulation with two multi-fingered hands
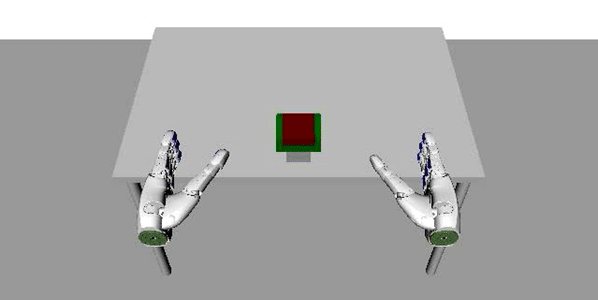
Here we present a method to plan grasp motion by 2 arms with multi-fingered hands. we propose a task priority based scheme to plan grasping area consistent with whole steps of the given task procedure. Based on the grasping area and the concept of preshape, we derive desired fingertip positions and hand base position and orientation for preshape. Based on the vector field approach, we propose a motion planning method for the planned grasp by multi-fingered hands to avoid any undesired collisions. This method can be applied to regrasping and a motion in which collision is required.
- Tetsuyou Watanabe and Michael Beetz, Grasp Motion Planning for box opening task by multi-fingered hands and arms, Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA2009) , pp.1-7, 2009.