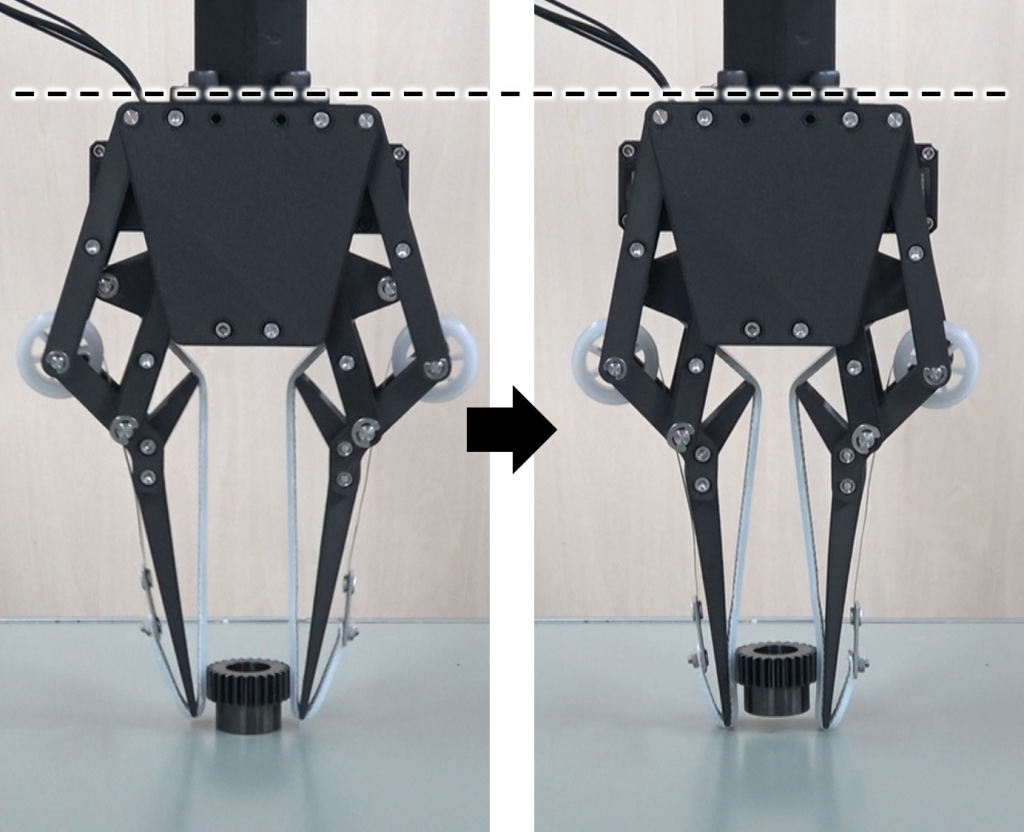
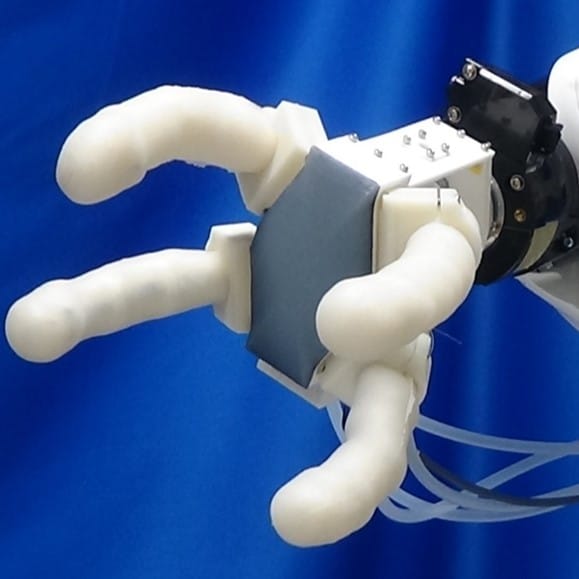
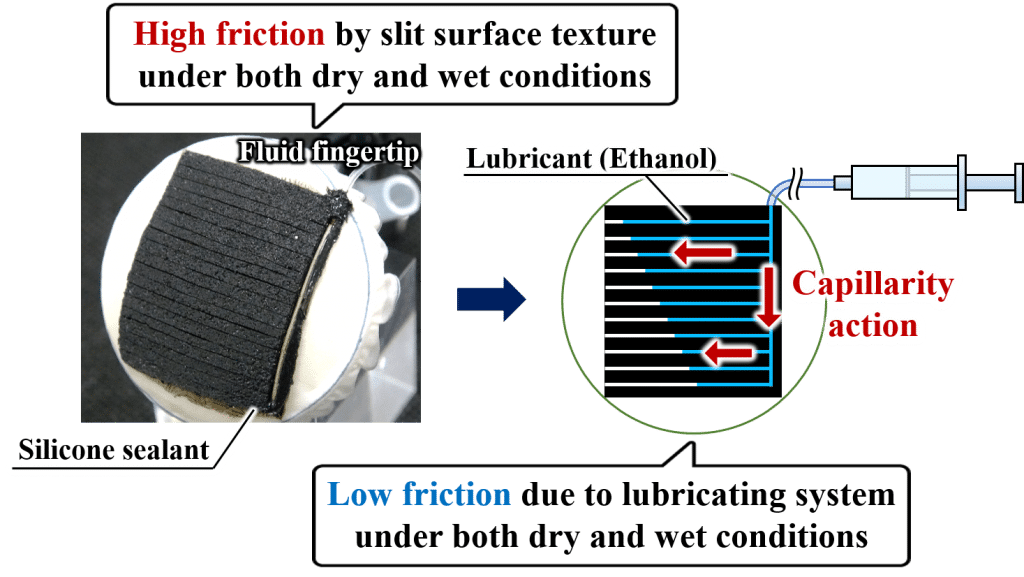
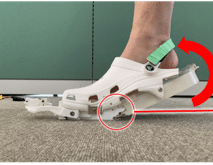
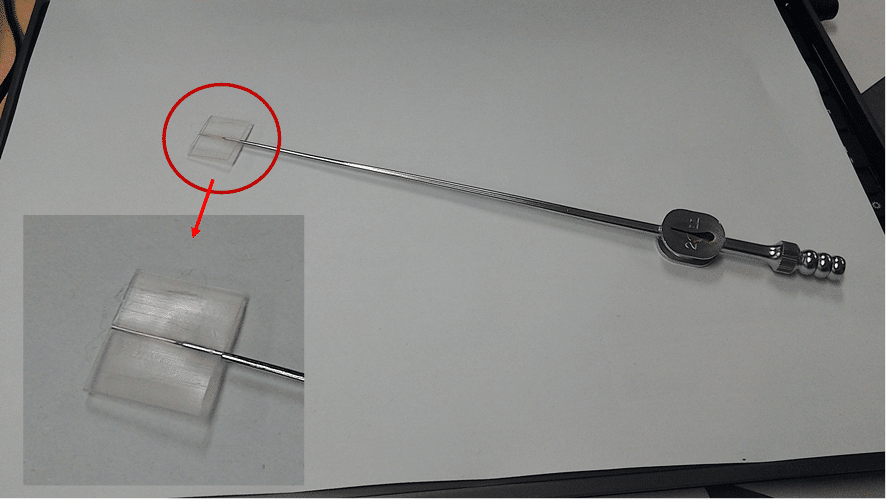
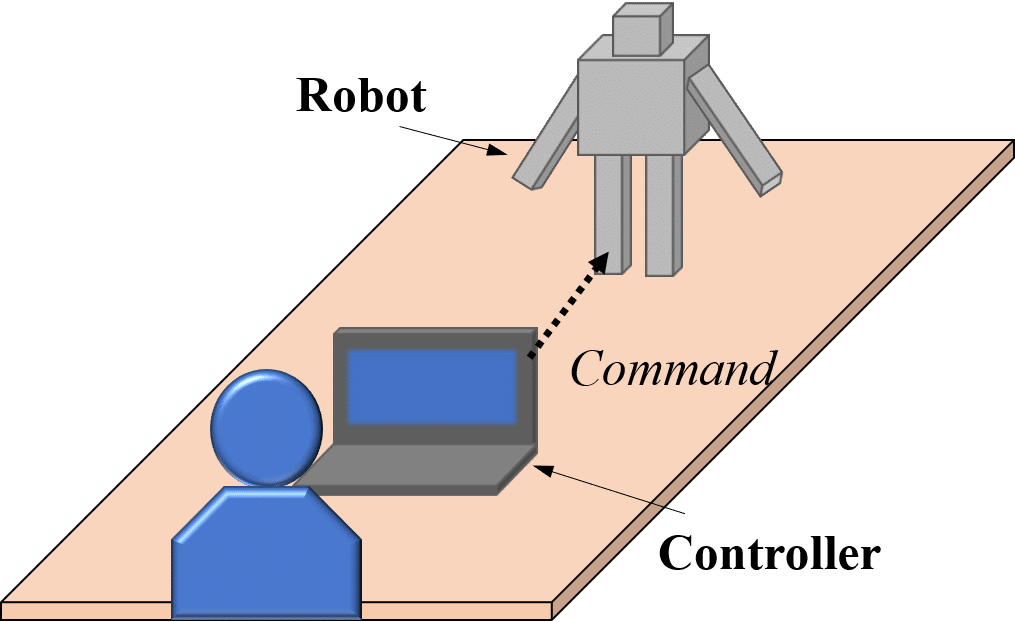
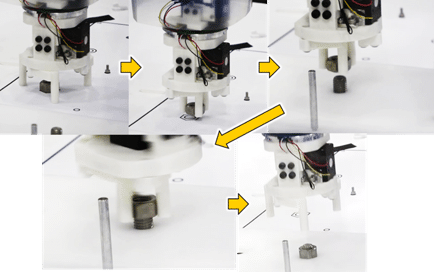
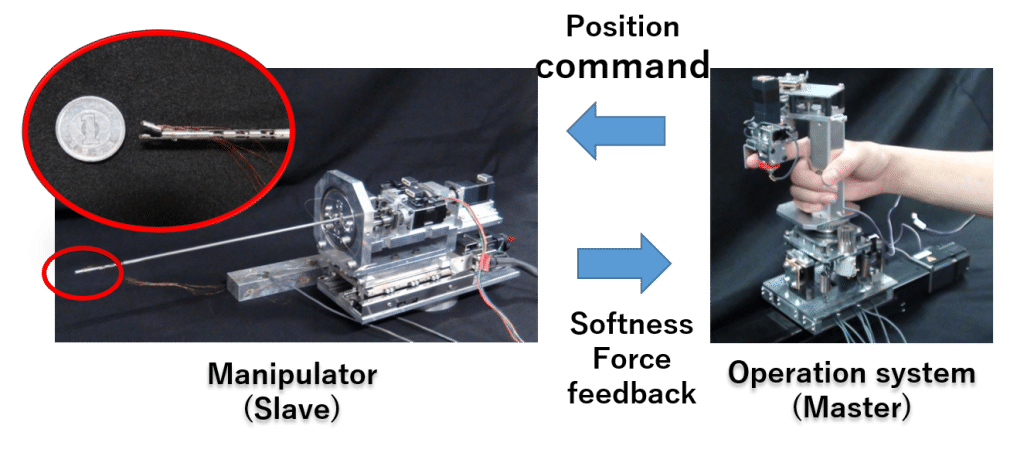
Tetsuyou Watanabe/Nishimura Group Publications HMI Youtube Channel Sheet-based gripper featuring passive pull-in functionality for bin picking and for picking up thin flexible objects Multi-Fingered Robotic Hand Based on Hybrid Mechanism of Tendon-Driven and Jamming Transition Deformable fingertip with a friction reduction system based on lubricating effect for smooth operation under both dry and wet conditions Universal grasping Wearable Clog-Integrated Plantar Visualization System Medical instruments for neurosurgery Specific aspects of operating an unfamiliar touchscreen for individuals with autism spectrum disorders (©IEEE)Lightweight, High-Force Gripper Inspired by Chuck Clamping Devices High-speed gripper with position-alignment functionality based on quick-return mechanism Delicate grasping Medical Robots Past works Force Sensor Attachable to Endoscopes Object grasping and manipulation Identification of the Causative Disease through Walking Motion Analysis Role of softness in object grasping Adhesion Forces Reduction by Oscillation for Micro Manipulation Stiffness Measurement System Using Endoscopes with a Visualization Method